%%html
<style type="text/css">
input.good:checked + label {color: green}
input.bad:checked + label {color: red}
input.good:checked + label::after {color: green; content: ' Õige vastus!'}
input.bad:checked + label::after {color: red; content: ' Vale vastus!'}
</style>
Lineaarne kahemõõtmeline süsteem ja tema püsipunktid¶
Üldine skeem¶
Kui on antud lineaarne kahemõõtmeline dünaamiline süsteem, siis on kindlaks püsipunktiks $\underline{x}_* = (0, 0)$. See tööleht näitab, kuidas saab määrata selle püsipunkti stabiilsust. Alljärgnev juhend võib kasuks olla.
Kirjutage oma süsteemi kujul $\underline{\dot{x}} = \underline{\underline{M}} \cdot \underline{x}$ maatriksiga $\underline{\underline{M}}$, ehk kujul
$$\begin{pmatrix}\dot{x}_1 \\ \dot{x}_2\end{pmatrix} = \begin{pmatrix}a & b \\ c & d\end{pmatrix} \cdot \begin{pmatrix}x_1 \\ x_2\end{pmatrix}$$
Leidke karakteristlikku võrrandit
$$0 = |\underline{\underline{M}} - \lambda\underline{\underline{1}}| = \begin{vmatrix}a - \lambda & b \\ c & d - \lambda\end{vmatrix} = (a - \lambda)(d - \lambda) - bc = \lambda^2 - \tau\lambda + \Delta,$$
kus $\tau = a + d$ on jälg ja $\Delta = ad - bc$ on determinant.
Arvutage omaväärtusi
$$\lambda_{1,2} = \frac{\tau}{2} \pm \sqrt{\frac{\tau^2}{4} - \Delta}.$$
Siin $\delta = \frac{\tau^2}{4} - \Delta$ on diskriminant.
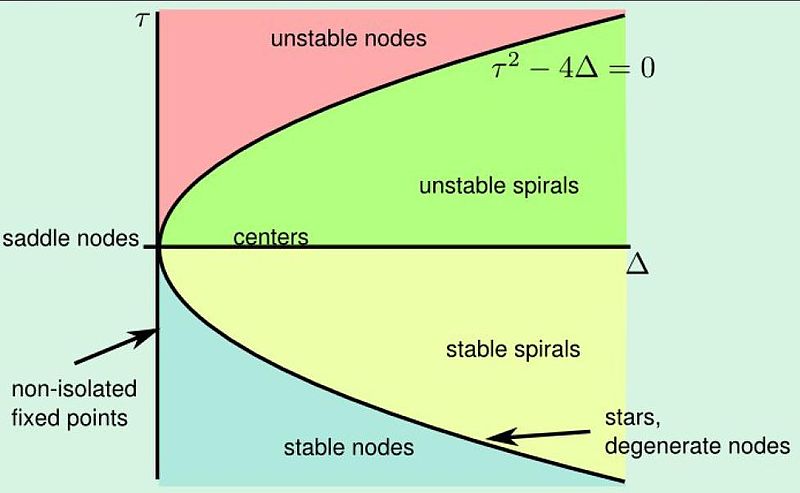
Püsipunkti $\underline{x}_* = (0, 0)$ tüüp sõltub maatriksi determinandist $\Delta$ ja jäljest $\tau$. Seda iseloomustada aitab selline skeem:
NumPy ja PyPlot aitavad meid püsipunkte visualiseerimiseks.
%matplotlib inline
import numpy as np
import matplotlib
import matplotlib.pyplot as plt
from IPython.display import display, Markdown
Alljärgnev funktsioon…
- …arvutab $\tau$, $\Delta$, $\delta$;
- …arvutab omaväärtusi;
- …joonistab faasiportreet.
def fixed(a, b, c, d):
tr = a + d
det = a * d - b * c
dis = tr ** 2 / 4.0 - det
display(Markdown('Maatriks: $\\begin{pmatrix}%f & %f \\\\ %f & %f\\end{pmatrix}$' % (a, b, c, d)))
display(Markdown('Jälg: τ = %f' % tr))
display(Markdown('Determinant: Δ = %f' % det))
display(Markdown('Diskriminant: δ = %f' % dis))
if dis > 0:
l1 = tr / 2 + np.sqrt(dis)
l2 = tr / 2 - np.sqrt(dis)
display(Markdown('Omaväärtused: λ<sub>1</sub> = %f, λ<sub>2</sub> = %f' % (l1, l2)))
elif dis < 0:
re = tr / 2
im = np.sqrt(-dis)
display(Markdown('Omaväärtused: λ<sub>1</sub> = %f + %fi, λ<sub>2</sub> = %f + %fi' % (re, im, re, -im)))
else:
display(Markdown('Omaväärtused: λ<sub>1,2</sub> = %f' % (tr / 2)))
fig = plt.figure()
ax = fig.add_subplot(111)
ax.set_aspect('equal', 'box')
ax.set_xlabel('x')
ax.set_ylabel('y')
X = np.linspace(-9, 9, 101)
Y = np.linspace(-9, 9, 101)
XX, YY = np.meshgrid(X, Y)
DX = a * XX + b * YY
DY = c * XX + d * YY
ax.streamplot(XX, YY, DX, DY, color='b')
if a**2 + b**2 + c**2 + d**2 > 0:
X = np.linspace(-9, 9, 21)
Y = np.linspace(-9, 9, 21)
XX, YY = np.meshgrid(X, Y)
DX = a * XX + b * YY
DY = c * XX + d * YY
ax.quiver(XX, YY, DX, DY, color='r')
plt.show()
Püsipunktide tüübid¶
δ > 0, Δ > 0, τ > 0: ebastabiilne sõlm
Maatriksi omaväärtused on $\lambda_{1,2} = \frac{\tau}{2} \pm \sqrt{\delta}$. Mõlemad on positiivsed. Faasiportree on ebastabiilne sõlm. Püsipunkt $\underline{x}_* = (0, 0)$ on repeller.
fixed(3, 1, 1, 3)

δ > 0, Δ > 0, τ < 0: stabiilne sõlm
Maatriksi omaväärtused on $\lambda_{1,2} = \frac{\tau}{2} \pm \sqrt{\delta}$. Mõlemad on negatiivsed. Faasiportree on stabiilne sõlm. Püsipunkt $\underline{x}_* = (0, 0)$ on atraktor.
fixed(-3, -1, -1, -3)

δ > 0, Δ < 0: sadul
Maatriksi omaväärtused on $\lambda_{1,2} = \frac{\tau}{2} \pm \sqrt{\delta}$. Üks on negatiivne, üks on positiivne. Püsipunkt $\underline{x}_* = (0, 0)$ on sadul.
fixed(1, 3, 3, 1)

δ > 0, Δ = 0, τ > 0: ebastabiilne sirge
Maatriksi omaväärtused on $\lambda_1 = 0$ ja $\lambda_2 = \tau$. Üks on null, üks on positiivne. Faasiportree on ebastabiilne sirge. Püsipunkt $\underline{x}_* = (0, 0)$ on mitteisoleeritud.
fixed(1, -1, -1, 1)

δ > 0, Δ = 0, τ < 0: stabiilne sirge
Maatriksi omaväärtused on $\lambda_1 = 0$ ja $\lambda_2 = \tau$. Üks on null, üks on negatiivne. Faasiportree on stabiilne sirge. Püsipunkt $\underline{x}_* = (0, 0)$ on mitteisoleeritud.
fixed(-1, 1, 1, -1)

δ < 0, τ > 0: ebastabiilne fookus
Maatriksi omaväärtused on $\lambda_{1,2} = \frac{\tau}{2} \pm i\sqrt{-\delta}$. Nende reaalosad on positiivsed. Faasiportree on ebastabiilne fookus. Püsipunkt $\underline{x}_* = (0, 0)$ on repeller.
fixed(1, 1, -3, 1)

δ < 0, τ < 0: stabiilne fookus
Maatriksi omaväärtused on $\lambda_{1,2} = \frac{\tau}{2} \pm i\sqrt{-\delta}$. Nende reaalosad on negatiivsed. Faasiportree on stabiilne fookus. Püsipunkt $\underline{x}_* = (0, 0)$ on atraktor.
fixed(-1, 3, -1, -1)

δ < 0, τ = 0: tsenter
Maatriksi omaväärtused on $\lambda_{1,2} = i\sqrt{\Delta}$. Nende reaalosad on null. Püsipunkt $\underline{x}_* = (0, 0)$ on tsenter.
fixed(0, 1, -1, 0)

δ = 0, maatriks on diagonaalne, τ > 0: ebastabiilne sõlm
Maatriksi omaväärtused $\lambda_{1,2} = \frac{\tau}{2}$ on identsed ja positiivsed. Faasiportree on ebastabiilne sõlm. Püsipunkt $\underline{x}_* = (0, 0)$ on repeller.
fixed(1, 0, 0, 1)

δ = 0, maatriks on diagonaalne, τ < 0: stabiilne sõlm
Maatriksi omaväärtused $\lambda_{1,2} = \frac{\tau}{2}$ on identsed ja negatiivsed. Faasiportree on stabiilne sõlm. Püsipunkt $\underline{x}_* = (0, 0)$ on atraktor.
fixed(-1, 0, 0, -1)

δ = 0, maatriks on diagonaalne, τ = 0: degenereeritud
Maatriksi omaväärtused $\lambda_{1,2} = 0$ on identselt null. Faasiportree on degenereeritud. Püsipunkt $\underline{x}_* = (0, 0)$ on mitteisoleeritud.
fixed(0, 0, 0, 0)

δ = 0, maatriks ei ole diagonaalne, τ > 0: ebastabiilne tärn
Maatriksil on ainult üks positiivne omaväärtus $\lambda_1 = \frac{\tau}{2}$. Faasiportree on ebastabiilne tärn. Püsipunkt $\underline{x}_* = (0, 0)$ on repeller.
fixed(3, 1, -1, 1)

δ = 0, maatriks ei ole diagonaalne, τ < 0: stabiilne tärn
Maatriksil on ainult üks negatiivne omaväärtus $\lambda_1 = \frac{\tau}{2}$. Faasiportree on stabiilne tärn. Püsipunkt $\underline{x}_* = (0, 0)$ on atraktor.
fixed(-1, 1, -1, -3)

δ = 0, maatriks ei ole diagonaalne, τ = 0: degenereeritud tärn
Maatriksil on ainult üks omaväärtus $\lambda_1 = 0$. Faasiportree on degenereeritud tärn. Püsipunkt $\underline{x}_* = (0, 0)$ on mitteisoleeritud.
fixed(1, 1, -1, -1)

Küsimused¶
Nõrga hõõrdejõuga ühemõõtmeline lineaarne pendel¶
Ühemõõtmelist pendli kirjeldab liikumisvõrrand
$$\ddot{x} = -kx - h\dot{x}.$$Eeldage, et $h > 0$ ja $k > \frac{h^2}{4}$. Kirjutage liikumisvõrrandi dünaamilise süsteemi kujul, kasutades definitsiooni $v = \dot{x}$. Milline on süsteemi püsipunkt $(x_*, v_*) = (0, 0)$?
Tugeva hõõrdejõuga ühemõõtmeline lineaarne pendel¶
Milliseks muutub eelnevalt kirjeldatud süsteemi püsipunkt $(x_*, v_*) = (0, 0)$, kui $0 < k < \frac{h^2}{4}$?
Ilma hõõrdejõuta ühemõõtmeline lineaarne pendel¶
Milliseks muutub eelnevalt kirjeldatud süsteemi püsipunkt $(x_*, v_*) = (0, 0)$, kui $h = 0$ ja $k > 0$?